The NA360 absolute encoder reports the absolute position of a shaft angle in 0 to 359° format.
The encoder has two parts;
 1/ The sensor, a synchro transmitter (working around 268Hz Diameter 63mm
/
1/ The sensor, a synchro transmitter (working around 268Hz Diameter 63mm
/
2.5inch) , with a strong aluminium body and ball
bearings.
2/ The interface (already wired
to the sensor) is built in a small water resistant PVC case which dimensions
are 100x65x38mm. 3.9x2.5x1.5inch.
 The
interface which transforms the synchro signal and calculates the shaft
angle position, sends the result to the PC with the built-in RS232 output
(9 pin Dsub that can be directly plugged into the PC). The sensor can be
installed 5 meters away from the PC with the already wired encoder and
interface.
The
interface which transforms the synchro signal and calculates the shaft
angle position, sends the result to the PC with the built-in RS232 output
(9 pin Dsub that can be directly plugged into the PC). The sensor can be
installed 5 meters away from the PC with the already wired encoder and
interface.
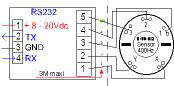
The interface must be DC powered (from 8 to 32Vdc) and needs only 25mA. The supply is done with the two wires coming out of the RS232 connector on the PC side. The red wire is the positive and the black the negative. The position is sent by any shaft angle change, and if no change, each half second. The encoder is shipped with a baud rate of 4800b/s. Connecting any of the two points marked 1 to 5 on the PCB, will change the baud rate accordingly to 1200, 2400, 4800, 9600 and 19200 b/s by next powerup.
 Not
recommended, but if changed, the adjustment of the only variable resistor
makes possible to tune the encoder within 1%. To retune, connect the jumper
right from point 1, and read the info's send by the encoder to the PC screen.
Use Hyper Terminal to make some test.
Not
recommended, but if changed, the adjustment of the only variable resistor
makes possible to tune the encoder within 1%. To retune, connect the jumper
right from point 1, and read the info's send by the encoder to the PC screen.
Use Hyper Terminal to make some test.
Application: Sun collector, Solar panel positioning. Bow propeller positioning. Antenna positioning. Wind direction sensor. Machine shaft position control.